【预测模型】基于matlab SVM电力系统短期负荷预测【含Matlab源码 280期】
本文共 1448 字,大约阅读时间需要 4 分钟。
一、简介
支持向量机(Support Vector Machine)是Cortes和Vapnik于1995年首先提出的,它在解决小样本、非线性及高维模式识别中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中。
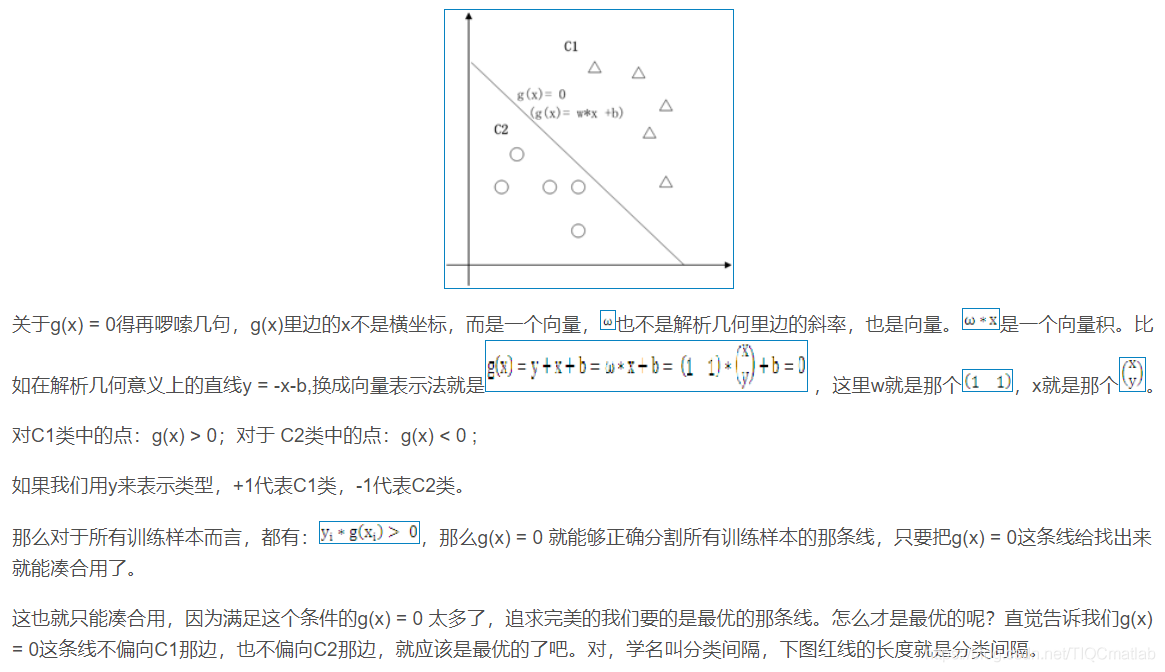
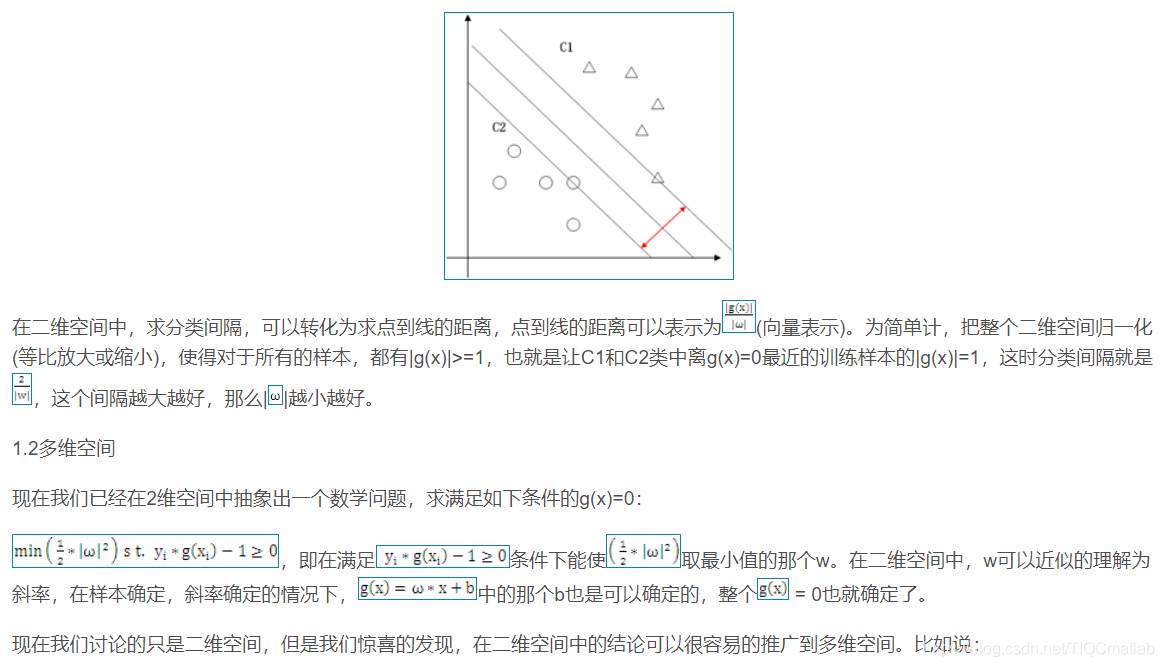
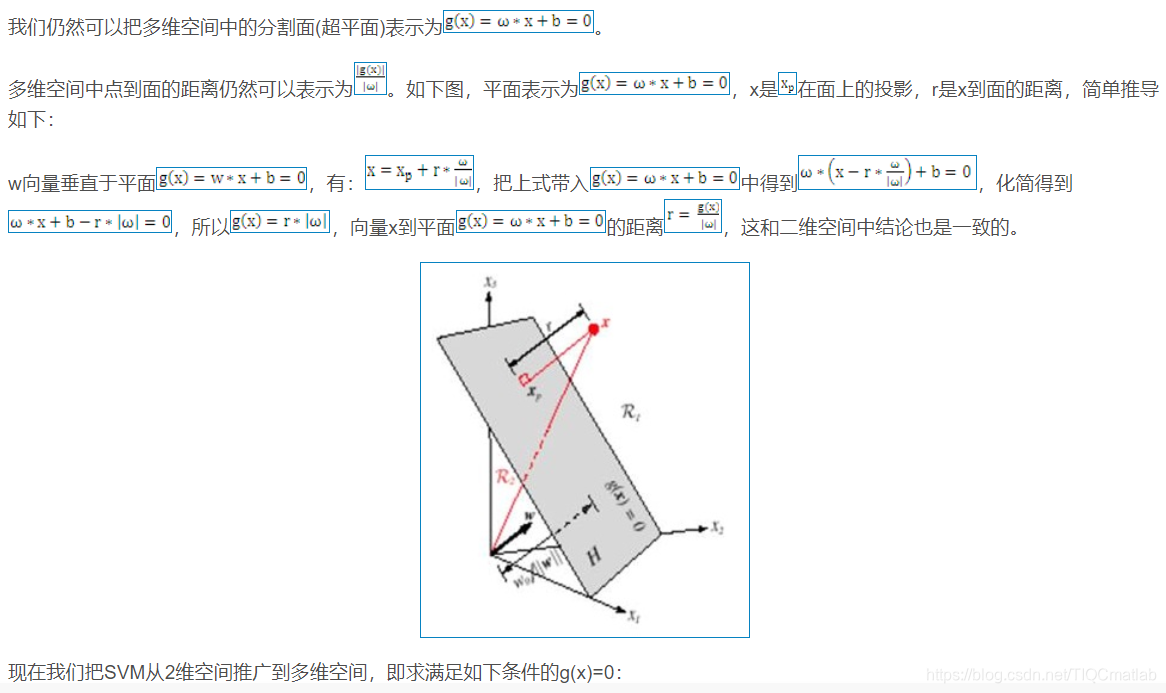
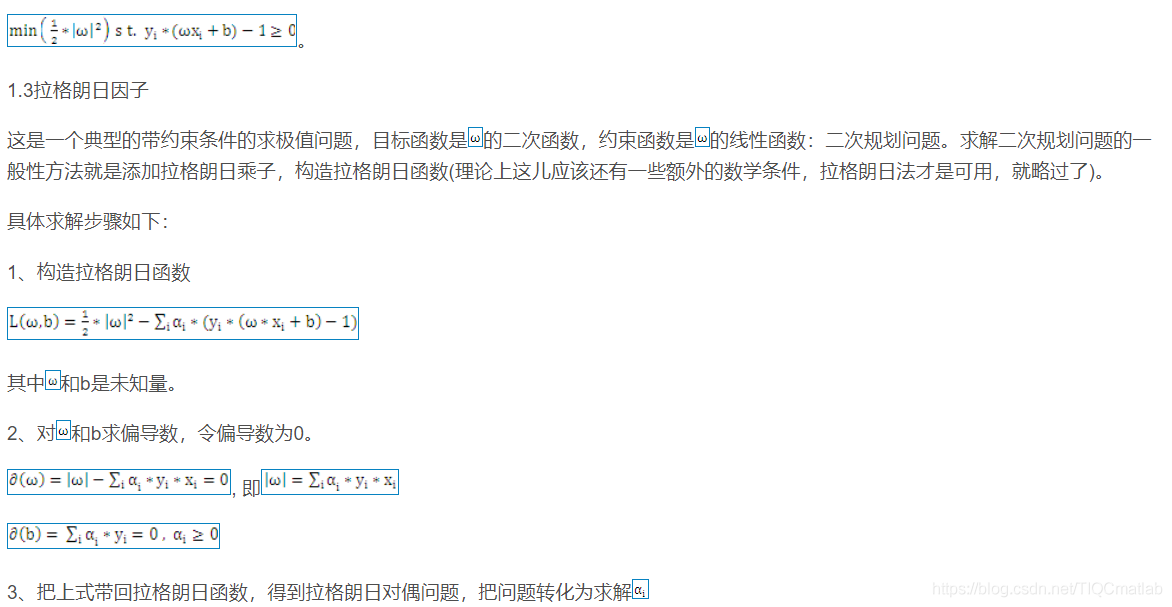
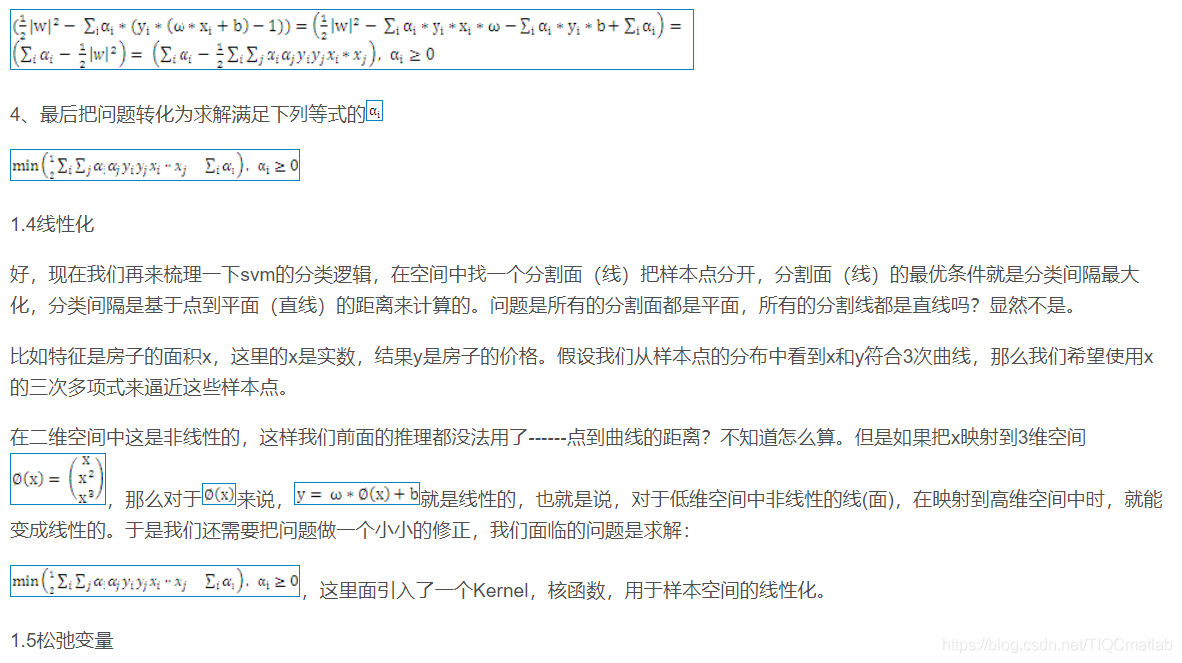
1 数学部分 1.1 二维空间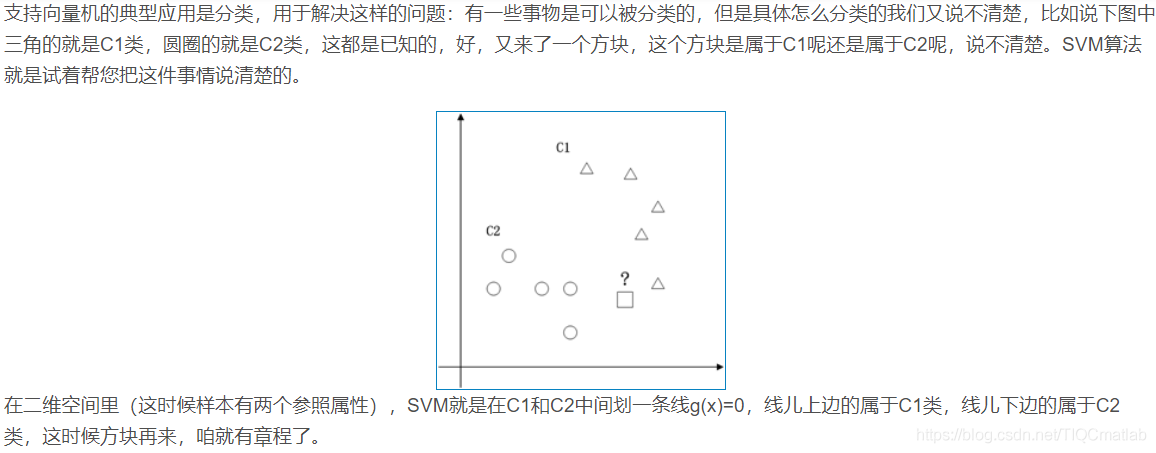
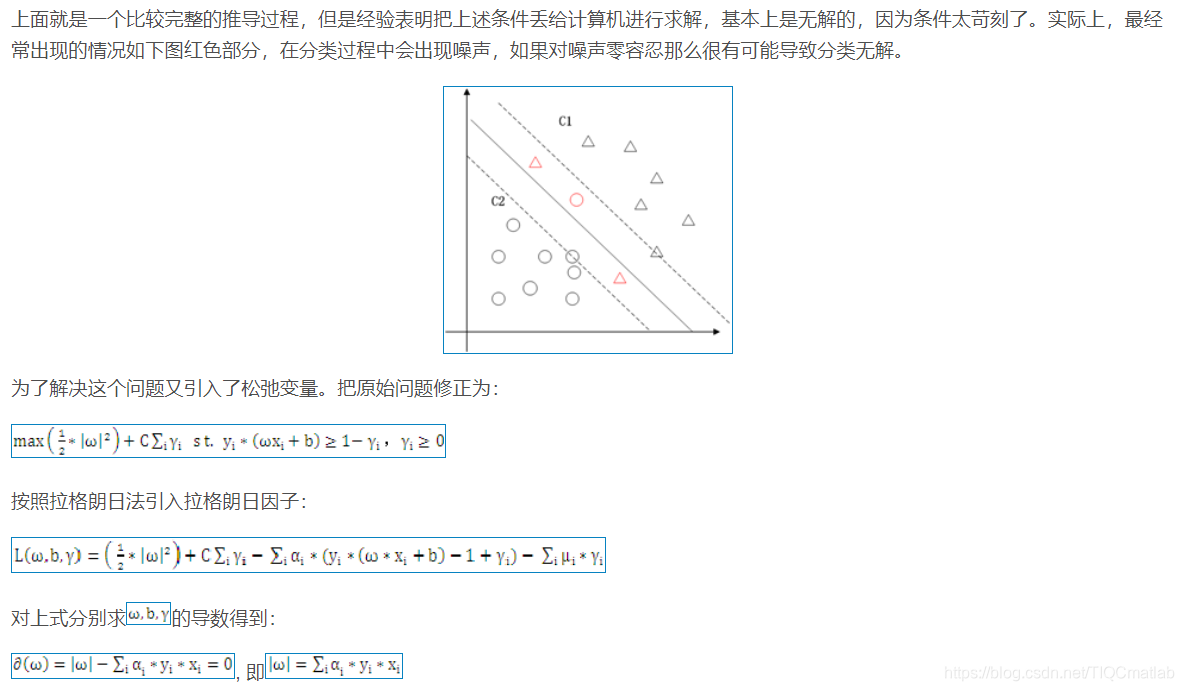

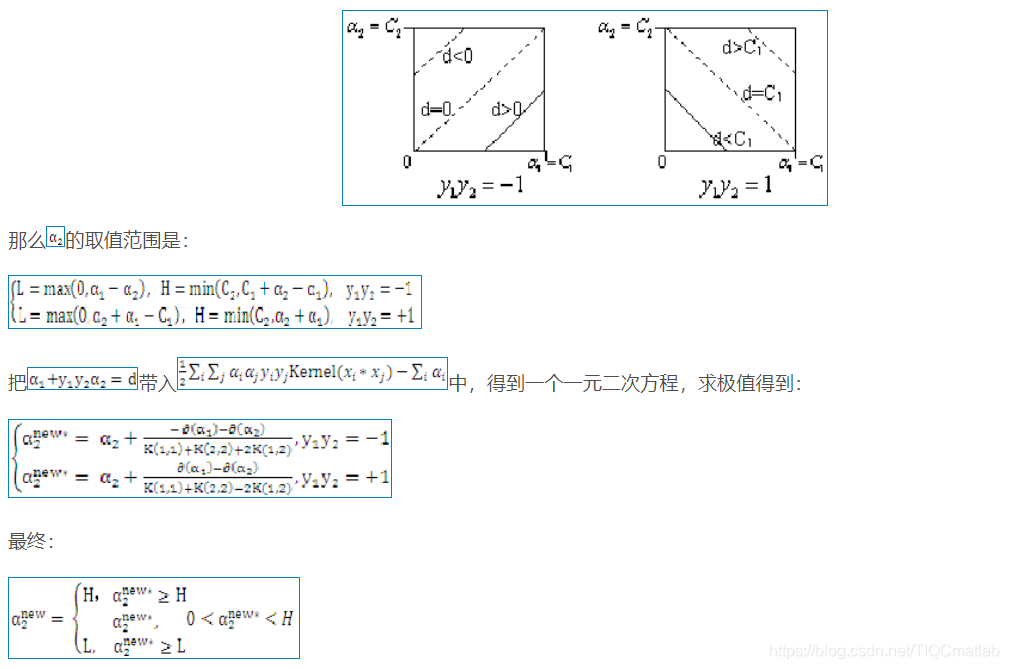
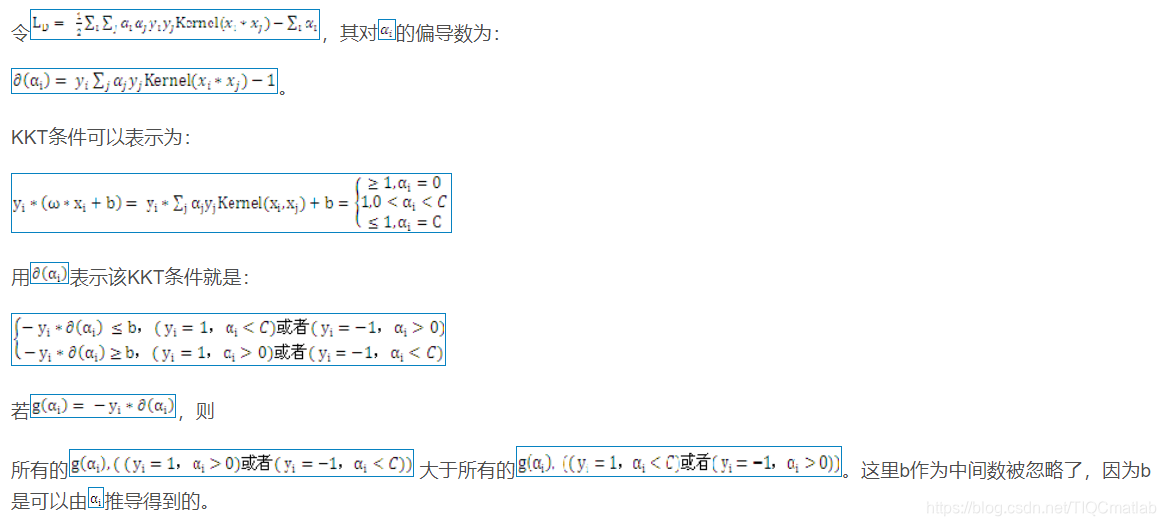 2 算法部分
2 算法部分 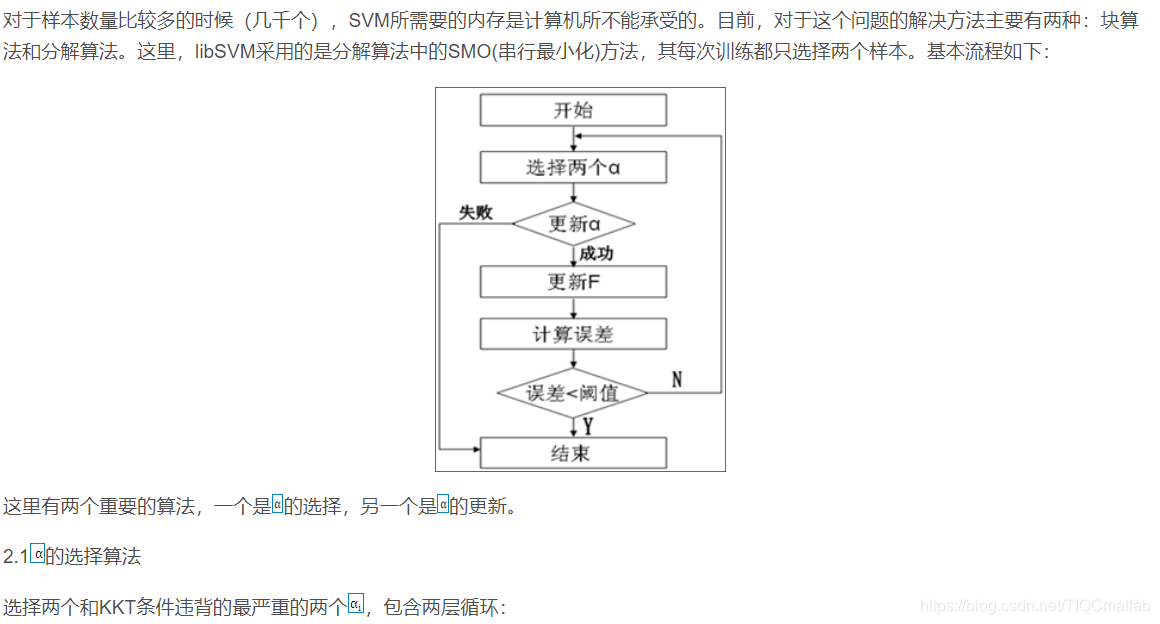

二、源代码
clc;clear C = 30;theta = 2;%C为最小二乘支持向量机的正则化参数,theta为高斯径向基的核函数参数,两个需要进行优化选择调试NumOfPre = 1;%预测天数,在此预测本季度最后七天%以负荷的加权为参考1al = 2;%温度的加权be = 1;%湿度的加权th = 1;%星期的加权Time = 48;Data = xlsread('input.xls');%此为从excel表格读数据的命令,表示将表格的数据读到Data数组中,省略表格中的第一行第一列文字部分 可输入你要预测的表格名称Data = Data(2:end,:);[M,N] = size(Data);%计算读入数据的行和列 M行N列Data1 = Data;for i = 1:2 maxData = max(Data(:,i)); minData = min(Data(:,i)); Data1(:,i) = (Data(:,i) - minData)/(maxData-minData);%对温度进行归一化处理endfor i = 4:N Data1(:,i) = log10(Data(:,i)) ;%对负荷进行对数处理 温度和负荷的预处理 可采用不同的方法 可不必拘泥endDim = M - 2 - NumOfPre;%训练样本数%拥有完整特征描述的数据共有M-2组!!Input = zeros(M,8,Time);%预先分配处理后的输入向量空间%8是特征空间的维度!也是x的元素数!!y = zeros(Dim,Time);for i = 3:M for j = 1:Time %%选取前一天温度、同一时刻的负荷,前两天的负荷,当天的温度作为输入特征 x = [Data1(i-1,1:3), Data1(i-1,j+3), Data1(i-2,j+3),Data1(i,1:3)];%x就是每一个负荷对应的特征向量!!! x(1)=al*x(1); x(6)=al*x(6); x(2)=be*x(2); x(7)=be*x(7); x(3)=th*x(3); x(8)=th*x(8); Input(i-2,:,j) = x;%Input(i,:,k)的含义为:第i天第j个时刻的负荷所对应的特征向量 y(i-2,j) = Data1(i,j+3); endendDist = zeros(Dim,Dim,Time);%预先分配距离空间for i=1:Time for j=1:Dim for k=1:Dim Dist(j,k,i) = (Input(j,:,i) - Input(k,:,i))*(Input(j,:,i) - Input(k,:,i))'; end endend 三、运行结果


四、备注
完整代码或者代写添加QQ1564658423
转载地址:http://vgmf.baihongyu.com/
你可能感兴趣的文章
mysql 常见问题
查看>>
MYSQL 幻读(Phantom Problem)不可重复读
查看>>
mysql 往字段后面加字符串
查看>>
mysql 快照读 幻读_innodb当前读 与 快照读 and rr级别是否真正避免了幻读
查看>>
MySQL 快速创建千万级测试数据
查看>>
mysql 快速自增假数据, 新增假数据,mysql自增假数据
查看>>
MySql 手动执行主从备份
查看>>
Mysql 批量修改四种方式效率对比(一)
查看>>
mysql 批量插入
查看>>
Mysql 报错 Field 'id' doesn't have a default value
查看>>
MySQL 报错:Duplicate entry 'xxx' for key 'UNIQ_XXXX'
查看>>
Mysql 拼接多个字段作为查询条件查询方法
查看>>
mysql 排序id_mysql如何按特定id排序
查看>>
Mysql 提示:Communication link failure
查看>>
mysql 插入是否成功_PDO mysql:如何知道插入是否成功
查看>>
Mysql 数据库InnoDB存储引擎中主要组件的刷新清理条件:脏页、RedoLog重做日志、Insert Buffer或ChangeBuffer、Undo Log
查看>>
mysql 数据库中 count(*),count(1),count(列名)区别和效率问题
查看>>
mysql 数据库备份及ibdata1的瘦身
查看>>
MySQL 数据库备份种类以及常用备份工具汇总
查看>>
mysql 数据库存储引擎怎么选择?快来看看性能测试吧
查看>>